VO(Velocity Obstacle)
VO其实本身并不能算是一种算法,他只是一种解决避障问题的思路,而后续的RVO以及ORCA其实都是基于这个设定。
它提出了一种叫做Velocity Obstacle的东西,其实它也非常见文知意,其实它就相当于将一系列可能会发生碰撞的速度在速度域(几何空间内表示为以横纵速度为基的坐标系)中划分出来作为一个需要避免的区域,在选择下一帧的速度时,避免这个区域内的速度就好了。
拥有VO这个概念以后,我们最容易想到的算法其实很简单,这也是我们一般称为“VO算法”的最基础的逻辑。
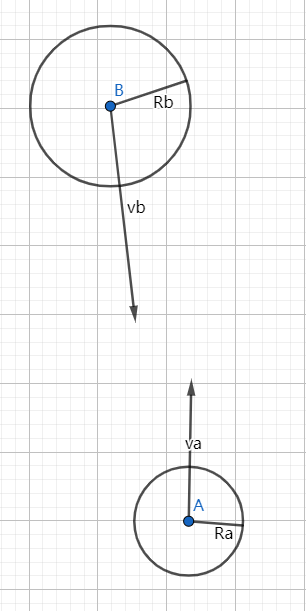
假设一个场景,A和B在空间中偶遇,因为VO算法本身是分布式的,也就是每个物体只考虑物体自身,这样做的好处和意义这里就不赘述了,所以,我们从A的角度来考虑这次偶遇。
我们假设A和B都有自己的社交安全距离,这个距离是一个圆形的范围,半径分别是RA和RB,那自然而然想到的算法就是:我们这一帧的相对移动要保证两个人的最近距离要大于等于RA+RB。
这是显而易见的,实现这个目标的方法也很简单,在A的位置放置一个质点,然后在B的位置放置一个半径为RA+RB的大圆,这个大圆以外的位置都是A结束时安全的相对位置,所以这一帧的相对移动只要位于圆外就可以
但是又因为,虽然结束位置只要在圆外就可以,但是因为移动过程是连续的,所以我们移动的路径实际上是初始点到终点的一条直线,因此我们还应该保证我们不应该“穿过”这个大圆而到达大圆后方,即大圆相对于质点位置的后方的锥形区域也是不可达的
我们画出几何图形其实相当显而易见
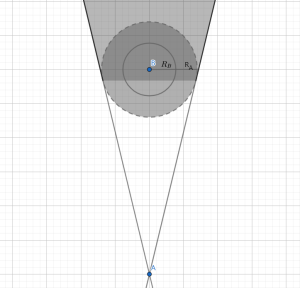
如上图,灰色区域就是不可达区域,但是为了计算简单,同时有一定的预判效果,VO算法把整个三角区域全部视为“危险”区域
需要联想到,此时所说的这一帧质点的相对位移,其实就是质点的单帧速度,而质点的单帧速度,其实就是A和B的相对速度,所以其实我们可以非常容易的把上图映射到速度域内,其坐标系原点即为质点的坐标
可以看出来图形和上面那张坐标图的几何结构基本是一样的,只不过这已经映射到速度域了(红色区域在坐标域为危险区域,在速度域即为VO)
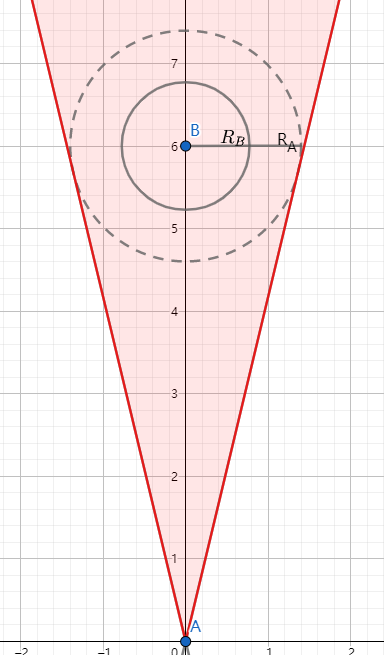
理论上当A和B的相对速度选择红色三角以外的点,即可安全错开
RVO(Reciprocal Velocity Obstacle)
VO的思想非常简单,漏洞也是非常明显的,就是会发生抖动,且两个agent的情况就有可能发生,让我们看看原文的例子
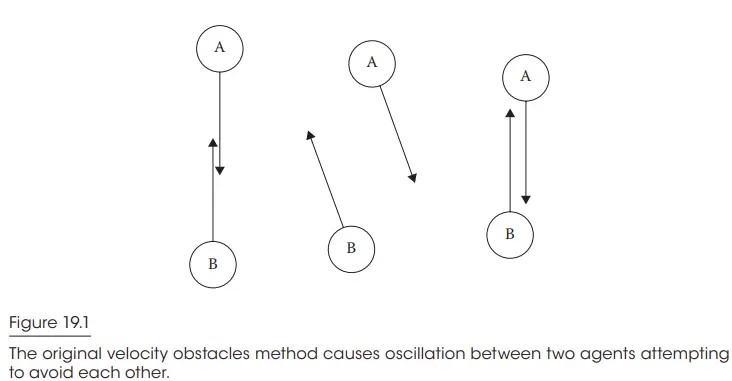
当A和B相向而行时,一开始A和B会错开,但当下一帧对方的速度发生变化时,他们又会把速度转回来,因为这个时候A会认为B就是向左上走的,所以我还是保持最佳的向下走也不会撞上,B也是这么想的,所以他们就转回来了
实际上这可能也不会造成最终的碰撞,因为在第二帧的时候,它们的速度确实是错开的,所以由于预判了碰撞,最终还是会很危险的错开
但这个过程中两个agent的反复横跳的过程还是不够优雅的,而原因也显而易见,VO算法中智能体总是默认其他智能体是稳定的恒速前进,这导致当对方的速度发生变化时,自己的行为就变得不符合预期
所以在RVO中最大的改进,就是我们假设对方也会使用和我们相同的策略,而非保持匀速运动。
在基础的VO算法中,产生抖动的原因是A在第2帧选择新速度之后,发现B的速度也变化了很多,A就会认为改回最佳速度(即直接指向目的地的速度)似乎也不会碰撞了,因为B的新速度其实就是假设A保持最佳速度也能不碰撞的情况下改变的,所以A就会认为B允许他转回来,但同时B也是这么想的。
然而在RVO中,A把自己的速度只改变1/2,也就是说,我们假设A和B想要错开,总共需要错开10cm,VO算法中A和B都会各自错开10cm,而在RVO算法中A只错开一半,也就是5cm,同时A假设B会错开另外一半,B也是这么想的,因此两者不谋而合,第二帧的时候,两个人各自错开了一半,并且发现此时转回最佳速度依然是会碰撞的(因为每个人只转了一半嘛),因此有效避免了上述抖动的现象。
ORCA(Optimal Reciprocal Collision Avoidance)
RVO虽然解决了VO算法出现的问题,并且在单对单的避障中几乎总是表现良好,但当智能体的数量增多时,还是会出现不符合预期的现象
假设下面一种情况,A和B一左一右的与C相向而行,在RVO中会遇到什么情况呢?
很简单,A认为C会向右转,因此自己向左转了1/2,而B认为C会向左转,因此自己向右转了1/2,而C实际上两种做法都没有选择,因为在VO图中,这实际上是两个锥体摆在自己的面前,所以C选择非常努力的向左或者向右转向
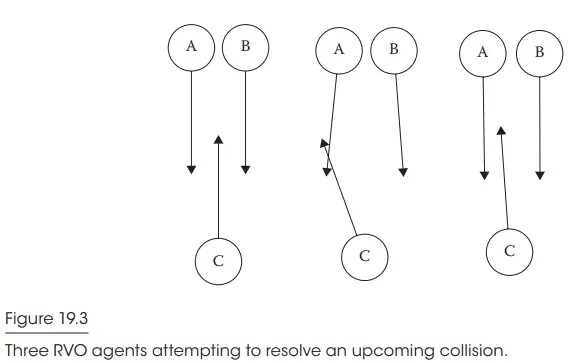
这个时候A、B、C三个人就都炸了,因为没有一个的预料是正确的,所以他们在第3帧时就会根据一个预料之外的对方速度修改自己的速度,从而形成抖动
其实原因也很简单,在RVO中,所有的智能体都假设对方只考虑自己
所以这次事故的原因就是,A认为C爱着自己,B也认为C爱着自己,但实际上C同时爱着对面两个人,就像是A找C约会,然后C把B带上一起了
虽然这种情况下实际上也不会发生真正的碰撞,因为A和B终究会向左右挪开,但过程中的抖动也是不符合预期的
后来ORCA就出现了,它切实的解决了上面这种抖动的问题(虽然我认为是碰巧解决了,因为ORCA相对于RVO的改进其实主要是效率原因)
ORCA与RVO最大的区别,在于VO的形状差异,在以往的VO算法中,VO都是以无限高度的锥形出现的,二维中就是同源的两条射线的夹角,但在ORCA中,我们使用一个有向平面来分割空间
因此求解最佳速度的计算也得到了优化,从一个由一堆尖角切出的空间变成了高考必考内容的线性规划问题
而ORCA是如何得到这个平面的呢?我们看图
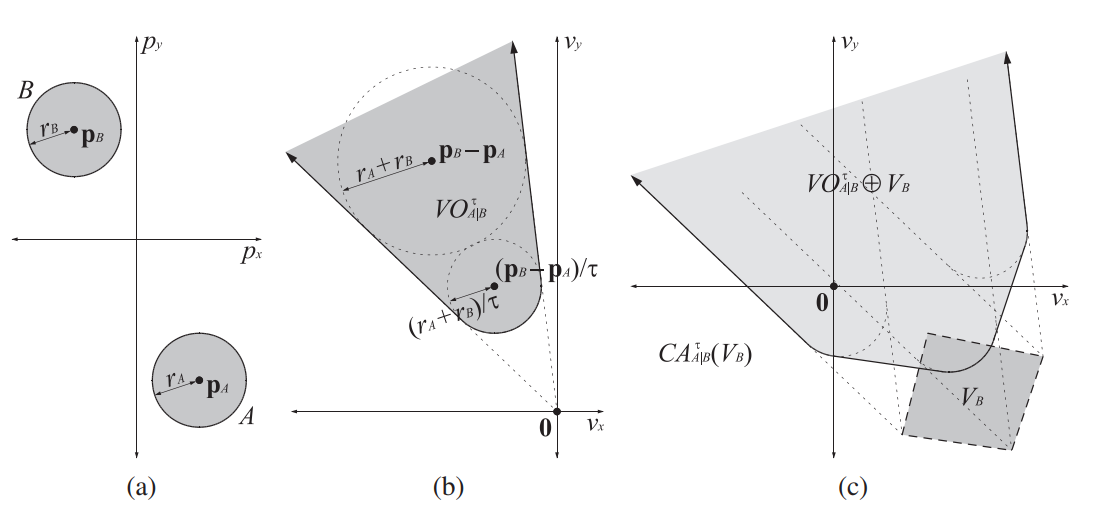
首先我们还是得理解这张图,这张图很重要,p是两点的位置,r是两智能体半径,τ是单位时间(我也不知道他为什么要用τ这个字母,可能因为是t的字源?)
图a是位置域,智能体A和B在这里偶遇了
这时候我们从A的角度来看问题,把A的位置放到原点,那么VO算法中不可达区域在位置域中的位置就如同图b中大圆的部分及其后的锥形空间,即以pb-pa为圆心,半径为ra+rb的圆
而在速度域中,单位时间τ内移动的距离(也就是设定的帧间隔,同时也算是开始避障的预警时间)其实就可以理解为速度,所以保证τ时间后不会进入上述位置的VO区域,即为图b中的灰色区域,即VO。
这个不难理解吧?简单来讲就是你用小圆上的速度,刚好τ时间后会到大圆的位置,所以VO就如图b。
图c我们不用管它,其实就是为了方便我们理解的,不过我觉得其实想弄懂它完全没啥意义,而且对我们理解也没啥帮助,而且代码里其实完全没用上。
理解了这个之后,如果把这个VO解释成一个锥体,其实就是类似前面说的VO,但是ORCA中是把它解释成了一个二分平面,这个平面大概如下图所示
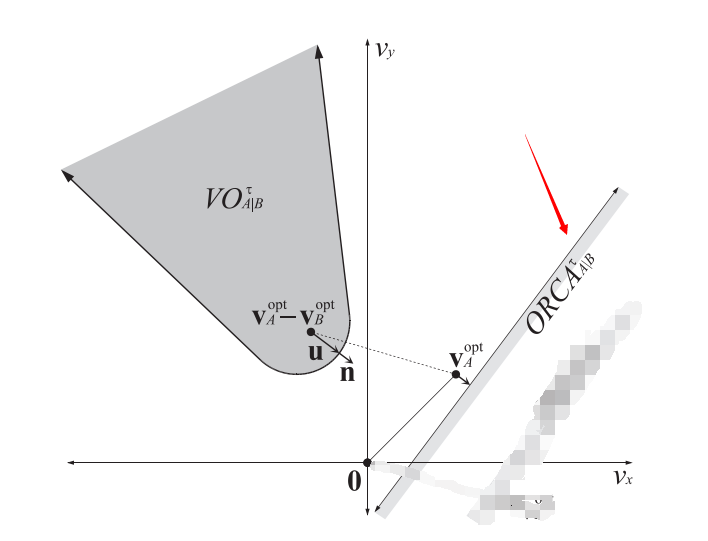
就是红色箭头指着的这个平面,马赛克掉的地方不用去管它,那是智能体B的平面,我们现在是智能体A,所以看不到
首先我解释一下图中的变量,vopt指的是两智能体的期望速度,一般就是指向目的地的速度,u是相对期望速度到上面计算出的VO区域外的最短向量,n是u指向的VO表面的位置的法线
这个时候平面就确定了,就是位于v的期望速度+u/2的方向为n的半平面
为啥这样确定咧?我相信聪明的小伙伴已经反应过来了,u是什么,u其实就是相对速度需要修改的值,相当于上面有一个例子里面的那10cm,所以vAopt+u/2其实就相当于A与B争端中的最佳修改后速度,到这里其实跟RVO是差不多的
但不同的是,我们得到这个值后并不是用它作为最终答案的一部分,而是由它确定了这个半平面
这个首先我们要说明为什么要确定一个半平面,其实之前说过了,使用半平面可以把问题转化为简单的线性规划问题,计算量断崖式下降
那么我们为什么要选择这个半平面呢?原因其实很简单,这是包含当前这次冲突最佳解决方案的半平面,相信聪明的小伙伴可以理解这句话。
所以,当A在完成多个平面的切割后,每次平面切割剩下的那个可选的半空间,都一定包含了当此冲突最佳解决方案的速度,比如与B之间的速度一定包含在第一个半空间内,与C之间的最佳速度一定包含在第二个半空间内
这样可以保证,在这么些半空间的交集内,出现与每个对手解决方案的最优速度的可能性是最大的,即使最后最佳速度被切走了,也总能选到相对更好的速度。
特殊情况
好的那么空间切割完毕之后,如果最佳速度处于当前空间内,就选择最佳速度,否则,就选择距离最佳速度最近的切割后空间内速度,这个速度一般位于空间的边界顶点处,也就转化为了一个简单的线性规划问题
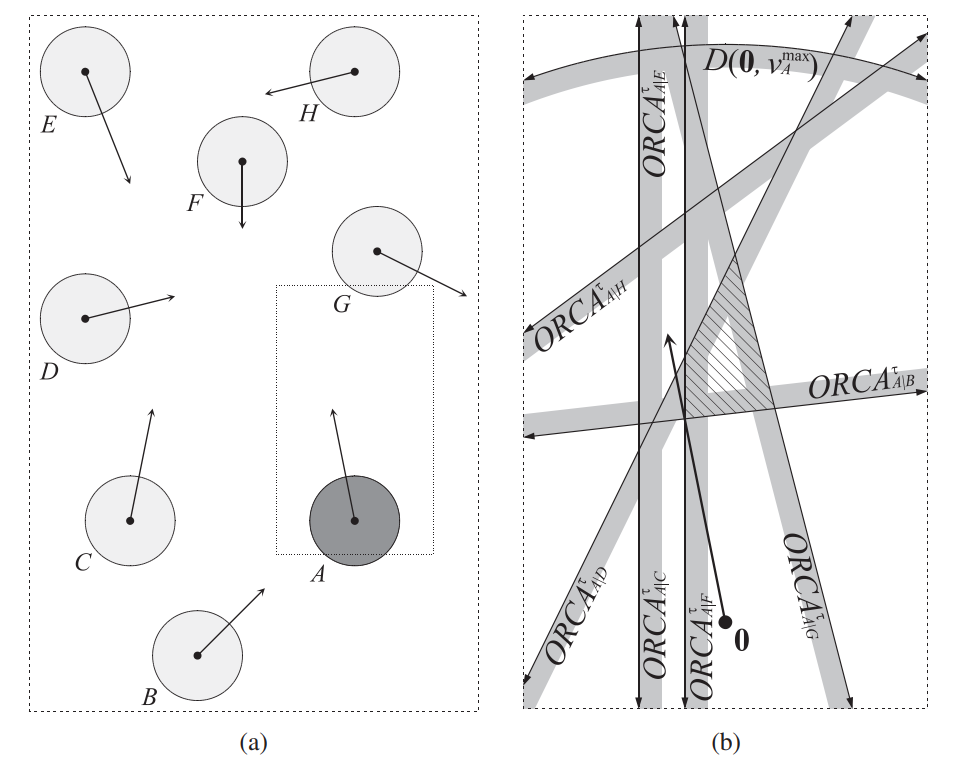
这是论文中的图,注意图b中有一条曲线,这是因为论文中还有一个vmax,即智能体能达到的最大速度,这也是合理的,不过不属于算法核心,所以前面没讲。
当然需要注意的是,当对手非常多时,ORCA是非常容易把整个空间全部切光的,因为前面也说了,每次都切掉近乎一半的空间,所以很容易发生这种情况
这种情况的解决方案其实也很简单,就是增加了一个d变量,它表示速度到当前半平面的距离,d为正时表示当前速度在这个半平面以内,为负时表示被半平面切掉了,我们就是要找d的最大和时对应的速度,也就相当于是违规最小的速度
从几何上看就直观很多,可以怎么理解呢,其实就是把半平面向外挪,让半平面少切一部分,使得这些个半平面刚好能切出一个点,同时对所有半平面的平移最少,就选这个点作为目标速度
静态障碍物
除此之外,论文中还讨论了关于静态障碍物的躲避,其实也是合理的,因为你在送餐的时候不能光躲会动的东西嘛,也要躲电线杆才行
这个的逻辑其实很简单,就是因为障碍物本身没有速度是静止的,所以作为智能体要负责全部的躲避责任,而不是1/2了
代码中比较复杂主要是因为障碍物的构成不是一个会移动的圆,而是一条条线段连成的多边形,所以计算上复杂了很多
相关链接